
A collaborative effort to develop an autonomous drone-based water sampling system for monitoring Lake Erie’s water quality, combining UAV technology with environmental science to combat agricultural runoff effects.
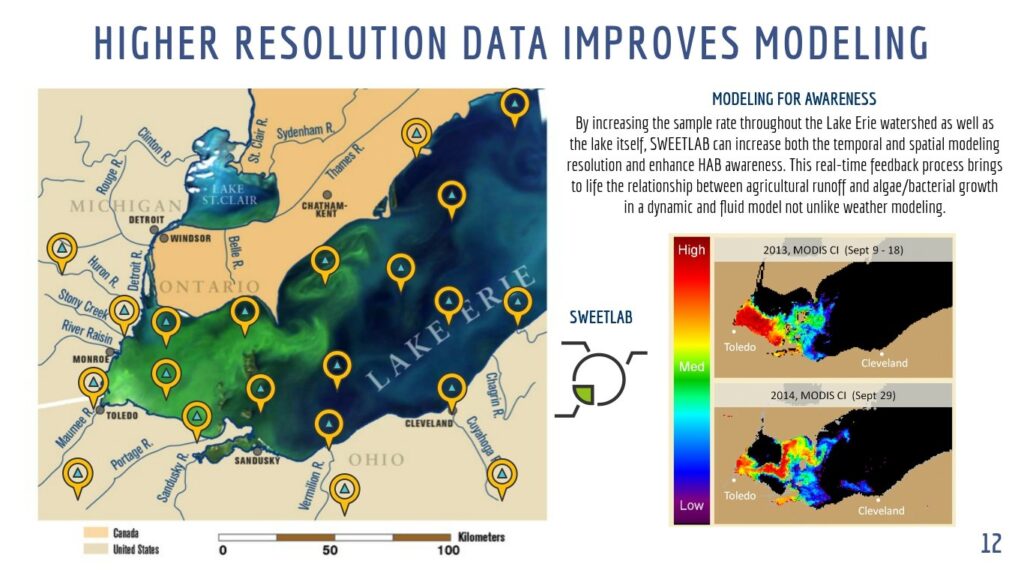
A page from our concept presented at the Hack Lake Erie competition 2016
When you think about drones and water, your first thought might be “those two don’t mix well.” Yet here we were, purposefully flying expensive equipment over one of North America’s Great Lakes. As part of the Erie Hack competition—a tech-driven water innovation challenge sponsored by NASA and the National Science Foundation—our team set out to revolutionize how we monitor Lake Erie’s water quality.
The Problem: A Lake Under Siege
Lake Erie has been fighting a silent battle against agricultural runoff for years. As farming operations in New York, Michigan, and Ohio send their excess nutrients downstream, the lake becomes an unwitting collector of nitrogen and potassium-rich water. These nutrients might sound harmless, but they’re the favorite food of algae, leading to massive blooms that would make even Shrek uncomfortable.

These algae blooms are far from a mere aesthetic issue. They’re oxygen-hungry party crashers that not only consume vital dissolved oxygen but also release toxins into the water. This creates a double whammy for local wildlife: less oxygen to breathe and more toxins to contend with. It’s like having a houseguest who both steals your food and leaves toxic waste in your living room.
Our Solution: The SweetLab System


Working alongside Dr. Javad Roostaei and his undergraduate team, we developed SweetLab—a drone-based autonomous water sampling system that could give researchers near real-time insights into Lake Erie’s water quality. Think of it as a flying water sommelier, but instead of tasting wine, it’s collecting water samples with scientific precision.

The Hack Lake Erie dream team!

Our team leader Dr. Javad Roostaei in his algae lab at Wayne State University
Technical Deep Dive
The system architecture consisted of several key components:
- Drone Platform:
- A quadcopter UAV capable of precise hovering and positioning
- Programmed with pre-planned flight paths for autonomous operation
- Two-stage altitude operation: 40 feet for transit, 1 meter for sampling
- Sampling Mechanism:
- Water sampling instrument suspended on a rigid tether
- Precise depth control for stratified sampling
- Design considerations for minimizing prop wash interference
- Data Infrastructure:
- 4G SIM card for real-time data transmission
- IoT devices sending XML-formatted data
- Cloud backend utilizing both AWS and Azure
- API-driven data organization and visualization

The sampling procedure was choreographed like a well-rehearsed dance: the drone would transit at 40 feet, hover over the sampling location, descend to one meter above the water, collect its sample, and then return to transit altitude. Each sample was geotagged, creating a precise spatial record of water quality variations.
Engineering Challenges

Like any good engineering project, we ran into some interesting challenges. The most significant was dealing with prop wash—turns out, four spinning propellers create quite a disturbance on the water surface. It’s like trying to take a photo of a lake while simultaneously throwing rocks into it. This turbidity affected our measurement accuracy, leading us to consider alternative designs like a catamaran-style platform with sampling equipment mounted between the hulls.
Lessons Learned
In retrospect, our approach, while innovative, had some limitations. The battery life constraints of drone systems meant we couldn’t match the persistence of traditional floating buoys. It’s a classic engineering trade-off: mobility versus endurance. While our system could cover more ground, it couldn’t maintain the constant presence that NOAA’s buoy systems provide.
However, our solution did offer significant advantages in terms of initial cost and deployment flexibility. Traditional buoy systems require expensive maintenance operations—imagine chartering a boat and crew just to change some batteries. Our drone system, while not perfect, could significantly reduce these operational costs while maintaining the ability to collect widely distributed data points.
Looking Forward

While we didn’t place in the competition, the project provided valuable insights into the challenges of automated environmental monitoring. The experience highlighted the importance of considering not just the technical feasibility but also the scalability and efficiency of environmental monitoring solutions.
The future of water quality monitoring likely lies in a hybrid approach, combining the persistence of traditional buoy systems with the flexibility of mobile platforms like our drone solution. Perhaps the next iteration will be solar-powered autonomous watercraft that can maintain station for months while occasionally repositioning to capture data from different areas.

Like many engineering projects, sometimes the most valuable outcome isn’t the solution itself, but the problems you discover along the way. In our case, we learned that sometimes the best way to monitor water isn’t from above it—but that doesn’t make the attempt any less worthwhile.
After all, every failed experiment is just a successful discovery of what doesn’t work. And in the world of engineering, knowing what doesn’t work is often just as valuable as knowing what does.